
VGG Network: Scene Recognition
In this project, I perform classification (scene recognition) with a VGG-type neural network using the miniplaces dataset to recognize the scene of images. 
Starting
import pickle
import numpy as np
import matplotlib.pyplot as plt
import os
import copy
from tqdm import tqdm
import torch
import torchvision
from torchvision import datasets, models, transforms
import torch.nn as nn
import torch.optim as optim
print("PyTorch Version: ",torch.__version__)
print("Torchvision Version: ",torchvision.__version__)
# Detect if we have a GPU available
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
if torch.cuda.is_available():
print("Using the GPU!")
else:
print("WARNING: Could not find GPU! Using CPU only. If you want to enable GPU, please to go Edit > Notebook Settings > Hardware Accelerator and select GPU.")
data_dir = "./data_miniplaces_modified"
PyTorch Version: 1.12.1+cu113
Torchvision Version: 0.13.1+cu113
Using the GPU!
Problem 5.1 Scene Recognition with VGG
You will build and train a convolutional neural network for scene recognition, i.e., classifying images into different scenes. You will need to:
- Construct dataloaders for train/val/test datasets
- Build MiniVGG and MiniVGG-BN (MiniVGG with batch-normalization layers)
- Train MiniVGG and MiniVGG-BN, compare their training progresses and their final top-1 and top-5 accuracies.
- (Optional) Increase the size of the network by adding more layers and check whether top-1 and top-5 accuracies will improve.
Step 0: Downloading the dataset.
# Download the miniplaces dataset
# Note: Restarting the runtime won't remove the downloaded dataset. You only need to re-download the zip file if you lose connection to colab.
!wget http://www.eecs.umich.edu/courses/eecs504/data_miniplaces_modified.zip
--2022-10-07 00:03:17-- http://www.eecs.umich.edu/courses/eecs504/data_miniplaces_modified.zip
Resolving www.eecs.umich.edu (www.eecs.umich.edu)... 141.212.113.199
Connecting to www.eecs.umich.edu (www.eecs.umich.edu)|141.212.113.199|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 534628730 (510M) [application/zip]
Saving to: ‘data_miniplaces_modified.zip’
data_miniplaces_mod 100%[===================>] 509.86M 11.1MB/s in 66s
2022-10-07 00:04:24 (7.69 MB/s) - ‘data_miniplaces_modified.zip’ saved [534628730/534628730]
# Unzip the download dataset .zip file to your local colab dir
# Warning: this upzipping process may take a while. Please be patient.
!unzip -q data_miniplaces_modified.zip
Step 1: Build dataloaders for train, val, and test
def get_dataloaders(input_size, batch_size, shuffle = True):
"""
Build dataloaders with transformations.
Args:
input_size: int, the size of the tranformed images
batch_size: int, minibatch size for dataloading
Returns:
dataloader_dict: dict, dict with "train", "val", "test" keys, each is mapped to a pytorch dataloader.
"""
mean = [0.485, 0.456, 0.406]
std = [0.229, 0.224, 0.225]
###########################################################################
# TODO: Step 1: Build transformations for the dataset. #
# You need to construct a data transformation that does three #
# preprocessing steps in order: #
# I. Resize the image to input_size using transforms.Resize #
# II. Convert the image to PyTorch tensor using transforms.ToTensor #
# III. Normalize the images with the provided mean and std parameters #
# using transforms.Normalize. These parameters are accumulated from a #
# large number of training samples. #
# You can use transforms.Compose to combine the above three #
# transformations. Store the combined transforms in the variable #
# 'composed_transform'. #
###########################################################################
composed_transform = transforms.Compose([transforms.Resize((input_size,input_size)),transforms.ToTensor(), transforms.Normalize(mean,std)])
###########################################################################
# END OF YOUR CODE #
###########################################################################
# We write the remaining part of the dataloader for you.
# You are encouraged to go through this.
###########################################################################
# Step 2: Build dataloaders. #
# I. We use torch.datasets.ImageFolder with the provided data_dir and the #
# data transfomations you created in step 1 to construct pytorch datasets #
# for training, validation, and testing. #
# II. Then we use torch.utils.data.DataLoader to build dataloaders with #
# the constructed pytorch datasets. You need to enable shuffling for #
# the training set. Set num_workers=2 to speed up dataloading. #
# III. Finally, we put the dataloaders into a dictionary. #
###########################################################################
# Create train/val/test datasets
data_transforms = {
'train': composed_transform,
'val': composed_transform,
'test': composed_transform
}
image_datasets = {x: datasets.ImageFolder(os.path.join(data_dir, x), data_transforms[x]) for x in data_transforms.keys()}
# Create training train/val/test dataloaders
# Never shuffle the val and test datasets
dataloaders_dict = {x: torch.utils.data.DataLoader(image_datasets[x], batch_size=batch_size, shuffle=False if x != 'train' else shuffle, num_workers=2) for x in data_transforms.keys()}
return dataloaders_dict
batch_size = 16
input_size = 128
dataloaders_dict = get_dataloaders(input_size, batch_size)
# Confirm your train/val/test sets contain 90,000/10,000/10,000 samples
print('# of training samples {}'.format(len(dataloaders_dict['train'].dataset)))
print('# of validation samples {}'.format(len(dataloaders_dict['val'].dataset)))
print('# of test samples {}'.format(len(dataloaders_dict['test'].dataset)))
# of training samples 90000
# of validation samples 10000
# of test samples 10000
# Visualize the data within the dataset
import json
with open('./data_miniplaces_modified/category_names.json', 'r') as f:
class_names = json.load(f)['i2c']
class_names = {i:name for i, name in enumerate(class_names)}
def imshow(inp, title=None, ax=None, figsize=(10, 10)):
"""Imshow for Tensor."""
inp = inp.numpy().transpose((1, 2, 0))
mean = np.array([0.485, 0.456, 0.406])
std = np.array([0.229, 0.224, 0.225])
inp = std * inp + mean
inp = np.clip(inp, 0, 1)
if ax is None:
fig, ax = plt.subplots(1, figsize=figsize)
ax.imshow(inp)
ax.set_xticks([])
ax.set_yticks([])
if title is not None:
ax.set_title(title)
# Get a batch of training data
inputs, classes = next(iter(dataloaders_dict['train']))
# Make a grid from batch
out = torchvision.utils.make_grid(inputs, nrow=4)
fig, ax = plt.subplots(1, figsize=(10, 10))
title = [class_names[x.item()] if (i+1) % 4 != 0 else class_names[x.item()]+'\n' for i, x in enumerate(classes)]
imshow(out, title=' | '.join(title), ax=ax)
Step 2. Build MiniVGG and MiniVGG-BN
Please follow the instructions to build the two neural networks with architectures shown below.
MiniVGG architecture
MiniVGG-BN architecure
# Helper function for counting number of trainable parameters.
def count_params(model):
"""
Counts the number of trainable parameters in PyTorch.
Args:
model: PyTorch model.
Returns:
num_params: int, number of trainable parameters.
"""
num_params = sum([item.numel() for item in model.parameters() if item.requires_grad])
return num_params
# Network configurations for all layers before the final fully-connected layers.
# "M" corresponds to maxpooling layer, integers correspond to number of output
# channels of a convolutional layer.
cfgs = {
'MiniVGG': [64, 'M', 128, 'M', 128, 128, 'M'],
'MiniVGG-BN': [64, 'M', 128, 'M', 128, 128, 'M']
}
def make_layers(cfg, batch_norm=False):
"""
Return a nn.Sequential object containing all layers to get the features
using the CNN. (That is, before the Average pooling layer in the two
pictures above).
Args:
cfg: list
batch_norm: bool, default: False. If set to True, a BatchNorm layer
should be added after each convolutional layer.
Return:
features: torch.nn.Sequential. Containers for all feature extraction
layers. For use of torch.nn.Sequential, please refer to
PyTorch documentation.
"""
###########################################################################
# TODO: Construct the neural net architecture from cfg. You should use #
# nn.Sequential(). #
###########################################################################
if batch_norm == False:
features = nn.Sequential(
nn.Conv2d(3,64, kernel_size=(3,3), stride=(1,1), padding=(1,1)),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1,ceil_mode=False),
nn.Conv2d(64,128,kernel_size=(3,3), stride=(1,1), padding=(1,1)),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),
nn.Conv2d(128,128,kernel_size=(3,3), stride=(1,1), padding=(1,1)),
nn.ReLU(inplace=True),
nn.Conv2d(128,128,kernel_size=(3,3),stride=(1,1), padding=(1,1)),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2,stride=2,padding=0,dilation=1,ceil_mode=False)
)
else:
features = nn.Sequential(
nn.Conv2d(3,64, kernel_size=(3,3), stride=(1,1), padding=(1,1)),
nn.BatchNorm2d(64,eps=1e-05,momentum=0.1,affine=True,track_running_stats=True),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1,ceil_mode=False),
nn.Conv2d(64,128,kernel_size=(3,3), stride=(1,1), padding=(1,1)),
nn.BatchNorm2d(128,eps=1e-05,momentum=0.1,affine=True,track_running_stats=True),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),
nn.Conv2d(128,128,kernel_size=(3,3), stride=(1,1), padding=(1,1)),
nn.BatchNorm2d(128,eps=1e-05,momentum=0.1,affine=True,track_running_stats=True),
nn.ReLU(inplace=True),
nn.Conv2d(128,128,kernel_size=(3,3),stride=(1,1), padding=(1,1)),
nn.BatchNorm2d(128,eps=1e-05,momentum=0.1,affine=True,track_running_stats=True),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2,stride=2,padding=0,dilation=1,ceil_mode=False)
)
###########################################################################
# END OF YOUR CODE #
###########################################################################
return features
class VGG(nn.Module):
def __init__(self, features, num_classes=100, init_weights=True):
super(VGG, self).__init__()
self.features = features
self.avgpool = nn.AdaptiveAvgPool2d((5, 5))
#######################################################################
# TODO: Construct the final FC layers using nn.Sequential. #
# Note: The average pooling layer has been defined by us above. #
#######################################################################
self.classifier = nn.Sequential(
nn.Linear(in_features=3200, out_features=512, bias=True),
nn.ReLU(inplace=True),
nn.Dropout(p=0.3,inplace=False),
nn.Linear(in_features=512,out_features=256,bias=True),
nn.ReLU(inplace=True),
nn.Dropout(p=0.3,inplace=False),
nn.Linear(in_features=256,out_features=100,bias=True)
)
#######################################################################
# END OF YOUR CODE #
#######################################################################
if init_weights:
self._initialize_weights()
def forward(self, x):
x = self.features(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.classifier(x)
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01)
nn.init.constant_(m.bias, 0)
features = make_layers(cfgs['MiniVGG'], batch_norm=False)
vgg = VGG(features)
features = make_layers(cfgs['MiniVGG-BN'], batch_norm=True)
vgg_bn = VGG(features)
# Print the network architectrue. Please compare the printed architecture with
# the one given in the instructions above.
# Make sure your network has the same architecture as the one we give above.
print(vgg)
print('Number of trainable parameters {}'.format(count_params(vgg)))
print(vgg_bn)
print('Number of trainable parameters {}'.format(count_params(vgg_bn)))
VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(3): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): ReLU(inplace=True)
(5): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(6): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(7): ReLU(inplace=True)
(8): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(9): ReLU(inplace=True)
(10): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(5, 5))
(classifier): Sequential(
(0): Linear(in_features=3200, out_features=512, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.3, inplace=False)
(3): Linear(in_features=512, out_features=256, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.3, inplace=False)
(6): Linear(in_features=256, out_features=100, bias=True)
)
)
Number of trainable parameters 2166756
VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(4): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(5): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(6): ReLU(inplace=True)
(7): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(8): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(9): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(10): ReLU(inplace=True)
(11): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(12): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(13): ReLU(inplace=True)
(14): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(5, 5))
(classifier): Sequential(
(0): Linear(in_features=3200, out_features=512, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.3, inplace=False)
(3): Linear(in_features=512, out_features=256, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.3, inplace=False)
(6): Linear(in_features=256, out_features=100, bias=True)
)
)
Number of trainable parameters 2167652
Step 3. Build small ResNet model (EECS 504)
Please follow this figure to build the Residual Block and the Resnet model. We already implemented the back bone of the resnet model. You have to code the ResNet Block and the classifier part which are shown in the figure.
ResNet architecture
# For EECS 504 students only other please delete/comment this cell
class ResidualBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride = 1):
super(ResidualBlock, self).__init__()
###########################################################################
# TODO: Code the residual block as depicted in the above figure. You should use #
# nn.Sequential(). #
###########################################################################
self.block1 = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size = 3, stride = stride, padding = 1),
nn.BatchNorm2d(out_channels),
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size = 3, stride = stride, padding = 1),
nn.BatchNorm2d(out_channels)
)
self.relu = nn.ReLU()
#######################################################################
# END OF YOUR CODE #
#######################################################################
def forward(self, x):
###########################################################################
# TODO: Code the forward pass for the residual block as depicted in the above figure.
# Note: The relu activation function is after the skip connection. #
###########################################################################
identity = x
out = self.block1(x)
out = torch.add(out, identity)
out = self.relu(out)
#######################################################################
# END OF YOUR CODE #
#######################################################################
return out
# For EECS 504 students only other please delete/comment this cell
class ResNet(nn.Module):
def __init__(self, block, layers, num_classes = 100):
super(ResNet, self).__init__()
###########################################################################
# TODO: Construct the neural net architecture for the resnet model. You should use nn.Sequential().
# Note: We already implemented most of the network you just need to code the initial layers and insert the residual blocks.
###########################################################################
self.backbone = nn.Sequential(
###########################################################################
# TODO: Code the initial layers i.e the the strided convolution layer, batchnorm, relu, maxpool layer and the residual blocks
#Hint: you have to make use of the "block" variable.
###########################################################################
nn.Sequential(
nn.Conv2d(3, 64, kernel_size = 7, stride = 2, padding = 3),
nn.BatchNorm2d(64),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3,stride=2,padding=1),
block(64,64),
),
#######################################################################
# END OF YOUR CODE #
#######################################################################
nn.Sequential(
nn.Conv2d(64, 128, kernel_size = 3, stride = 2, padding = 1),
nn.BatchNorm2d(128),
nn.ReLU()),
###########################################################################
# TODO: Inser the residual block please follow the figure for the number of channels and the flow of layers.
###########################################################################
block(128,128),
#######################################################################
# END OF YOUR CODE #
#######################################################################
nn.Sequential(
nn.Conv2d(128, 256, kernel_size = 3, stride = 2, padding = 1),
nn.BatchNorm2d(256),
nn.ReLU()),
###########################################################################
# TODO: Inser the residual block please follow the figure for the number of channels and the flow of layers.
###########################################################################
block(256,256),
#######################################################################
# END OF YOUR CODE #
#######################################################################
nn.Sequential(
nn.Conv2d(256, 512, kernel_size = 3, stride = 2, padding = 1),
nn.BatchNorm2d(512),
nn.ReLU()),
###########################################################################
# TODO: Inser the residual block please follow the figure for the number of channels and the flow of layers.
###########################################################################
block(512,512)
#######################################################################
# END OF YOUR CODE #
#######################################################################
)
self.avgpool = nn.AvgPool2d(2, stride=1)
self.fc = nn.Linear(512, num_classes)
def forward(self, x):
x = self.backbone(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
# For EECS 504 students only other please delete/comment this cell
resnet = ResNet(ResidualBlock, [1, 1, 1, 1], 100)
print(resnet)
print('Number of trainable parameters {}'.format(count_params(resnet)))
ResNet(
(backbone): Sequential(
(0): Sequential(
(0): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3))
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
(3): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(4): ResidualBlock(
(block1): Sequential(
(0): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
(3): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(relu): ReLU()
)
)
(1): Sequential(
(0): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
(2): ResidualBlock(
(block1): Sequential(
(0): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
(3): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(relu): ReLU()
)
(3): Sequential(
(0): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
(4): ResidualBlock(
(block1): Sequential(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
(3): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(relu): ReLU()
)
(5): Sequential(
(0): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
)
(6): ResidualBlock(
(block1): Sequential(
(0): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU()
(3): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(relu): ReLU()
)
)
(avgpool): AvgPool2d(kernel_size=2, stride=1, padding=0)
(fc): Linear(in_features=512, out_features=100, bias=True)
)
Number of trainable parameters 7884516
Step 4: Build training/validation loops
You will write a function for training and validating the network.
def make_optimizer(model):
"""
Args:
model: NN to train
Returns:
optimizer: pytorch optmizer for updating the given model parameters.
"""
###########################################################################
# TODO: Create a SGD optimizer with learning rate=1e-2 and momentum=0.9. #
# HINT: Check out optim.SGD() and initialize it with the appropriate #
# parameters. We have imported torch.optim as optim for you above. #
###########################################################################
optimizer = optim.SGD(model.parameters(), lr=1e-2, momentum=0.9)
###########################################################################
# END OF YOUR CODE #
###########################################################################
return optimizer
def get_loss():
"""
Returns:
criterion: pytorch loss.
"""
###########################################################################
# TODO: Create an instance of the cross entropy loss. This code #
# should be a one-liner. #
###########################################################################
criterion = nn.CrossEntropyLoss()
###########################################################################
# END OF YOUR CODE #
###########################################################################
return criterion
def train_model(model, dataloaders, criterion, optimizer, save_dir = None, num_epochs=25, model_name='MiniVGG'):
"""
Args:
model: The NN to train
dataloaders: A dictionary containing at least the keys
'train','val' that maps to Pytorch data loaders for the dataset
criterion: The Loss function
optimizer: Pytroch optimizer. The algorithm to update weights
num_epochs: How many epochs to train for
save_dir: Where to save the best model weights that are found. Using None will not write anything to disk.
Returns:
model: The trained NN
tr_acc_history: list, training accuracy history. Recording freq: one epoch.
val_acc_history: list, validation accuracy history. Recording freq: one epoch.
"""
val_acc_history = []
tr_acc_history = []
best_model_wts = copy.deepcopy(model.state_dict())
best_acc = 0.0
for epoch in range(num_epochs):
print('Epoch {}/{}'.format(epoch, num_epochs - 1))
print('-' * 10)
# Each epoch has a training and validation phase
for phase in ['train', 'val']:
if phase == 'train':
model.train() # Set model to training mode
else:
model.eval() # Set model to evaluate mode
# loss and number of correct prediction for the current batch
running_loss = 0.0
running_corrects = 0
# Iterate over data.
# TQDM has nice progress bars
for inputs, labels in tqdm(dataloaders[phase]):
inputs = inputs.to(device)
labels = labels.to(device)
###############################################################
# TODO: #
# Please read all the inputs carefully! #
# For "train" phase: #
# (i) Compute the outputs using the model #
# Also, use the outputs to calculate the class #
# predicted by the model, #
# Store the predicted class in 'preds' #
# (Think: argmax of outputs across a dimension) #
# torch.max() might help! #
# (ii) Use criterion to store the loss in 'loss' #
# (iii) Update the model parameters #
# Notes: #
# - Don't forget to zero the gradients before beginning the #
# loop! #
# - "val" phase is the same as train, but without backprop #
# - Compute the outputs (Same as "train", calculate 'preds' #
# too), #
# - Calculate the loss and store it in 'loss' #
###############################################################
if phase == 'train':
optimizer.zero_grad()
outputs = model(inputs)
_, preds = torch.max(outputs.data,1)
loss = criterion(outputs,labels)
loss.backward()
optimizer.step()
else:
optimizer.zero_grad()
outputs = model(inputs)
_, preds = torch.max(outputs.data,1)
loss = criterion(outputs,labels)
###############################################################
# END OF YOUR CODE #
###############################################################
# statistics
running_loss += loss.item() * inputs.size(0)
running_corrects += torch.sum(preds == labels.data)
epoch_loss = running_loss / len(dataloaders[phase].dataset)
epoch_acc = running_corrects.double() / len(dataloaders[phase].dataset)
print('{} Loss: {:.4f} Acc: {:.4f}'.format(phase, epoch_loss, epoch_acc))
# deep copy the model
if phase == 'val' and epoch_acc > best_acc:
best_acc = epoch_acc
best_model_wts = copy.deepcopy(model.state_dict())
# save the best model weights
# =========================================================== #
# IMPORTANT:
# Losing your connection to colab will lead to loss of trained
# weights.
# You should download the trained weights to your local machine.
# Later, you can load these weights directly without needing to
# train the neural networks again.
# =========================================================== #
if save_dir:
torch.save(best_model_wts, os.path.join(save_dir, model_name + '.pth'))
# record the train/val accuracies
if phase == 'val':
val_acc_history.append(epoch_acc)
else:
tr_acc_history.append(epoch_acc)
print('Best val Acc: {:4f}'.format(best_acc))
return model, tr_acc_history, val_acc_history
Step 5. Train MiniVGG / MiniVGG-BN and ResNet model (EECS 504)
# Number of classes in the dataset
# Miniplaces has 100
num_classes = 100
# Batch size for training
batch_size = 128
# Shuffle the input data?
shuffle_datasets = True
# Number of epochs to train for
# During debugging, you can set this parameter to 1
# num_epochs = 1
# Training for 20 epochs. This will take about half an hour.
num_epochs = 20
### IO
# Directory to save weights to
save_dir = "weights"
os.makedirs(save_dir, exist_ok=True)
# get dataloaders and criterion function
input_size = 64
dataloaders = get_dataloaders(input_size, batch_size, shuffle_datasets)
criterion = get_loss()
# Initialize MiniVGG
features = make_layers(cfgs['MiniVGG'], batch_norm=False)
model = VGG(features).to(device)
optimizer = make_optimizer(model)
# Train the model!
vgg, tr_his, val_his = train_model(model=model, dataloaders=dataloaders, criterion=criterion, optimizer=optimizer,
save_dir=save_dir, num_epochs=num_epochs, model_name='MiniVGG')
# Initialize MiniVGG-BN
features = make_layers(cfgs['MiniVGG-BN'], batch_norm=True)
model = VGG(features).to(device)
optimizer = make_optimizer(model)
# Train the model!
vgg_BN, tr_his_BN, val_his_BN = train_model(model=model, dataloaders=dataloaders, criterion=criterion, optimizer=optimizer,
save_dir=save_dir, num_epochs=num_epochs, model_name='MiniVGG-BN')
# Initialize ResNet
resnet = ResNet(ResidualBlock, [1, 1, 1, 1], num_classes).to(device)
optimizer = make_optimizer(resnet)
# Train the model!
resnet, tr_his_res, val_his_res = train_model(model=resnet, dataloaders=dataloaders, criterion=criterion, optimizer=optimizer,
save_dir=save_dir, num_epochs=num_epochs, model_name='ResNet')
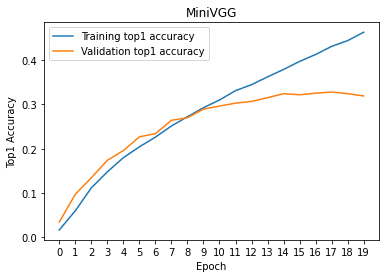
x = np.arange(num_epochs)
# train/val accuracies for MiniVGG
plt.figure()
plt.plot(x, torch.tensor(tr_his, device = 'cpu'))
plt.plot(x, torch.tensor(val_his, device = 'cpu'))
plt.legend(['Training top1 accuracy', 'Validation top1 accuracy'])
plt.xticks(x)
plt.xlabel('Epoch')
plt.ylabel('Top1 Accuracy')
plt.title('MiniVGG')
plt.show()
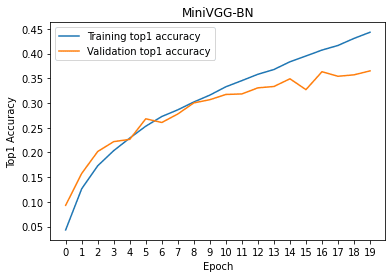
# train/val accuracies for MiniVGG-BN
plt.plot(x, torch.tensor(tr_his_BN, device = 'cpu'))
plt.plot(x, torch.tensor(val_his_BN, device = 'cpu'))
plt.legend(['Training top1 accuracy', 'Validation top1 accuracy'])
plt.xticks(x)
plt.xlabel('Epoch')
plt.ylabel('Top1 Accuracy')
plt.title('MiniVGG-BN')
plt.show()
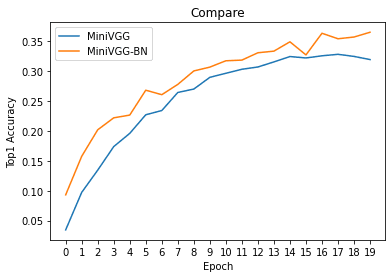
# compare val accuracies of MiniVGG and MiniVGG-BN
plt.plot(x, torch.tensor(val_his, device = 'cpu'))
plt.plot(x, torch.tensor(val_his_BN, device = 'cpu'))
plt.legend(['MiniVGG', 'MiniVGG-BN'])
plt.xticks(x)
plt.xlabel('Epoch')
plt.ylabel('Top1 Accuracy')
plt.title('Compare')
plt.show()
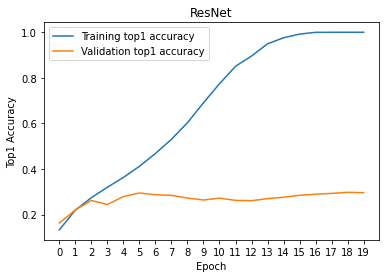
# For EECS 504 students only other please delete/comment this cell
# train/val accuracies for ResNet
plt.figure()
plt.plot(x, torch.tensor(tr_his_res, device = 'cpu'))
plt.plot(x, torch.tensor(val_his_res, device = 'cpu'))
plt.legend(['Training top1 accuracy', 'Validation top1 accuracy'])
plt.xticks(x)
plt.xlabel('Epoch')
plt.ylabel('Top1 Accuracy')
plt.title('ResNet')
plt.show()
TODO: Summarize the effect of batch normalization:
pickle.dump(tr_his, open('tr_his.pkl', 'wb'))
pickle.dump(tr_his_BN, open('tr_his_BN.pkl', 'wb'))
pickle.dump(val_his, open('val_his.pkl', 'wb'))
pickle.dump(val_his_BN, open('val_his_BN.pkl', 'wb'))
pickle.dump(tr_his_res, open('tr_his_res.pkl', 'wb'))
pickle.dump(val_his_res, open('val_his_res.pkl', 'wb'))
Step 6. Measure top1 and top5 accuracies of MiniVGG and MiniVGG-BN
Definition of top-k accuracy: if the correct label is within the top k predicted classes according to the network output scores, we count the prediction by the neural network as a correct prediction.
def accuracy(output, target, topk=(1,)):
"""
Computes the accuracy over the k top predictions for the specified values
of k.
Args:
output: pytorch tensor, (batch_size x num_classes). Outputs of the
network for one batch.
target: pytorch tensor, (batch_size,). True labels for one batch.
Returns:
res: list. Accuracies corresponding to topk[0], topk[1], ...
"""
with torch.no_grad():
maxk = max(topk)
batch_size = target.size(0)
_, pred = output.topk(maxk, 1, True, True)
pred = pred.t()
correct = pred.eq(target.view(1, -1).expand_as(pred))
res = []
for k in topk:
correct_k = correct[:k].reshape(-1).float().sum(0, keepdim=True)
res.append(correct_k.mul_(100.0 / batch_size))
return res
def test(model, dataloader):
model.eval()
top1_acc = []
top5_acc = []
with torch.no_grad():
for inputs, labels in dataloader:
inputs = inputs.to(device)
labels = labels.to(device)
outputs = model(inputs)
res = accuracy(outputs, labels, topk=(1, 5))
top1_acc.append(res[0] * len(outputs))
top5_acc.append(res[1] * len(outputs))
print('Top-1 accuracy {}%, Top-5 accuracy {}%'.format(sum(top1_acc).item()/10000, sum(top5_acc).item()/10000))
##### To pass the test, both networks should have Top-5 accuracy above 55% #####
vgg_BN.load_state_dict(torch.load('./weights/MiniVGG-BN.pth'))
vgg.load_state_dict(torch.load('./weights/MiniVGG.pth'))
test(vgg_BN, dataloaders['test'])
test(vgg, dataloaders['test'])
Top-1 accuracy 35.86%, Top-5 accuracy 66.45%
Top-1 accuracy 32.36%, Top-5 accuracy 62.08%
##### To pass the test, both networks should have Top-5 accuracy above 55% #####
# For EECS 504 students only other please delete/comment this cell
resnet.load_state_dict(torch.load('./weights/ResNet.pth'))
test(resnet, dataloaders['test'])
Top-1 accuracy 29.35%, Top-5 accuracy 56.53%
##### Download pretrained weights (TODO: remove for student version) #####
# !wget http://www.eecs.umich.edu/courses/eecs504/MiniVGG-BN.pth
# !wget http://www.eecs.umich.edu/courses/eecs504/MiniVGG.pth
# features = make_layers(cfgs['MiniVGG-BN'], batch_norm=True)
# vgg_BN = VGG(features).to(device)
# features = make_layers(cfgs['MiniVGG'], batch_norm=False)
# vgg = VGG(features).to(device)
# vgg_BN.load_state_dict(torch.load('MiniVGG-BN.pth'))
# vgg.load_state_dict(torch.load('MiniVGG.pth'))
# test(vgg_BN, dataloaders['test'])
# test(vgg, dataloaders['test'])